DEA - Dexterous Eye-guided Aiming [ITA]
by Tullio Facchinetti
DEA consiste in un sistema di puntamento in grado di agganciare la traiettoria di un oggetto in movimento, predirne il moto e colpirlo.
Il sistema è stato progettato per funzionare autonomamente, senza l’intervento di un operatore, anche per quanto riguarda la fase di calibrazione dei parametri che ne determinano il funzionamento. Il software è stato organizzato in modo modulare come un insieme di librerie, così da permettere il riutilizzo futuro delle soluzioni proposte senza apportare modifiche sostanziali al codice già scritto.
La descrizione completa del sistema è riportata nella tesi di laurea.
Calibrazione e tracking
In parallelo allo sviluppo del progetto sono stati eseguiti numerosi test su reti neurali di tipo Backpropagation (utilizzate per la calibrazione del sistema visivo), con lo scopo di caratterizzarne in modo qualitativo il comportamento in base alla variazione di alcuni parametri caratteristici.
Nel progetto sono state integrate metodologie proprie di svariati settori dell’ingegneria. Lo sviluppo del progetto ha comportato da un lato la costruzione del dispositivo meccanico di puntamento e dei circuiti elettronici ed elettromeccanici necessari a controllarlo, dall’altro la scrittura del software, per il quale sono state implementate tecniche di elaborazione dell’immagine, tecniche di controllo dei dispositivi hardware mediante driver appositamente progettati, algoritmi di intelligenza artificiale, in particolare nell’ambito delle reti neurali, e tecniche di controllo e monitoraggio di sistemi dinamici, il tutto sotto il controllo di un sistema operativo real-time in grado di garantire le specifiche temporali necessarie.
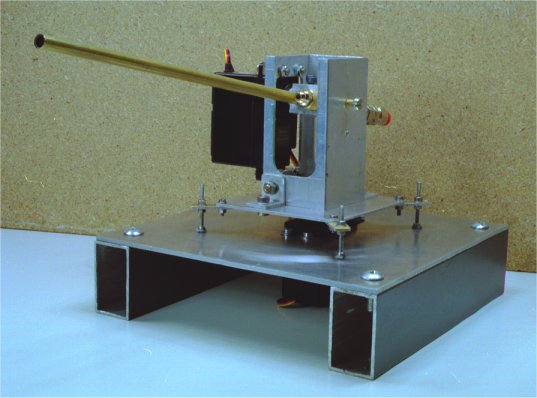
La soluzione proposta in questa tesi consiste in un dispositivo elettro-meccanico a 2 gradi di libertà rotazionali attuato da due servomotori, controllati da una rete neurale multistrato, addestrata con il metodo di Error Backpropagation.
Il tracking dell’oggetto da colpire viene effettuato grazie ad un predittore di Kalman, che lavora sui dati forniti da un sotto-processo di elaborazione grafica, il quale individua la posizione dell’oggetto a partire dalle immagini catturate da una telecamera fissa. Il software è gestito da un sistema operativo real-time, che si occupa di garantire i vincoli temporali necessari alle diverse operazioni.
Risultati
I testi di puntamento presentati in questa pagina, come meglio illustrato nel documento PDF scaricabile dal link sottostante, si riferiscono ad un bersaglio del diametro di circa 3 cm posto a circa 3 metri dal dispositivo di puntamento.