134 private links
An autonomous robot ping-pong player dubbed Ace has achieved a milestone for AI and robotics in Tokyo by competing against and sometimes defeating top-level human players at table tennis, a feat that could presage an array of other applications for similarly adept robots.
Ace, created by the Japanese company Sony's (6758.T), opens new tab AI research division, is the first robot to attain expert-level performance in a competitive physical sport, one that requires rapid decisions and precision execution, the project's leader said. Ace did so by employing high-speed perception, AI-based control and a state-of-the-art robotic system.


For robot navigation, we need odometry. Before we can determine a Hadabot's odometry, the Hadabot's ESP32 needs to compute and publish out its wheel's rotational velocity out to ROS2.
Researchers at EPFL have developed an ultra-light robotic insect that uses its soft artificial muscles to move at 3 cm per second across different types of terrain. It can be folded or crushed and yet continue to move.

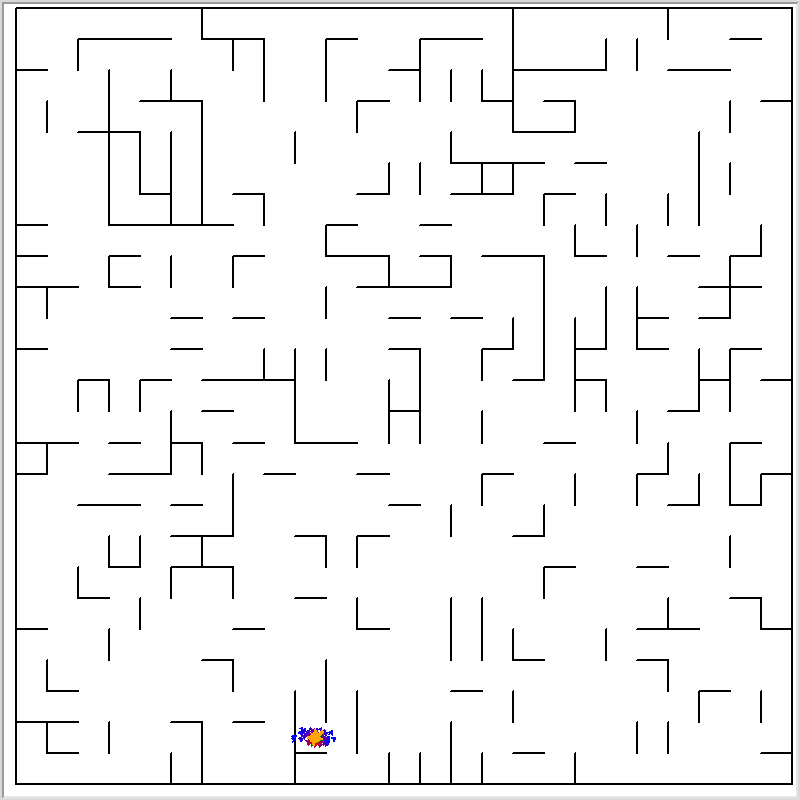
Particle filter is a Monte Carlo algorithm used to solve statistical inference problems. In this project, the turtle location and heading direction in maze was infered using particle filter. The green turtle is the actual location while the orange turtule is the estimated location. The arrows are particles. Blue arrows stand for low probability particles while red arrows stand for high probability particles. There are four sensors installed on the front, back, left and right of the turtle. The sensors measure its perpendicular distances to the closest walls in four directions, possibly bounded by some sensor limit.
Playing with our 9 new mini cheetah robots in Killian Court

SMACH is a task-level architecture for rapidly creating complex robot behavior. At its core, SMACH is a ROS-independent Python library to build hierarchical state machines. SMACH is a new library that takes advantage of very old concepts in order to quickly create robust robot behavior with maintainable and modular code.
A vegetable-picking robot that uses machine learning to identify and harvest a commonplace, but challenging, agricultural crop has been developed by engineers.
It's Friday, so why not watch some good old-fashioned drone-powered graffiti? A design firm in Italy has put together a lovely little show that collected sketches from the art community and put them all together in a giant mural, painted over 12 hours by a team of drones.

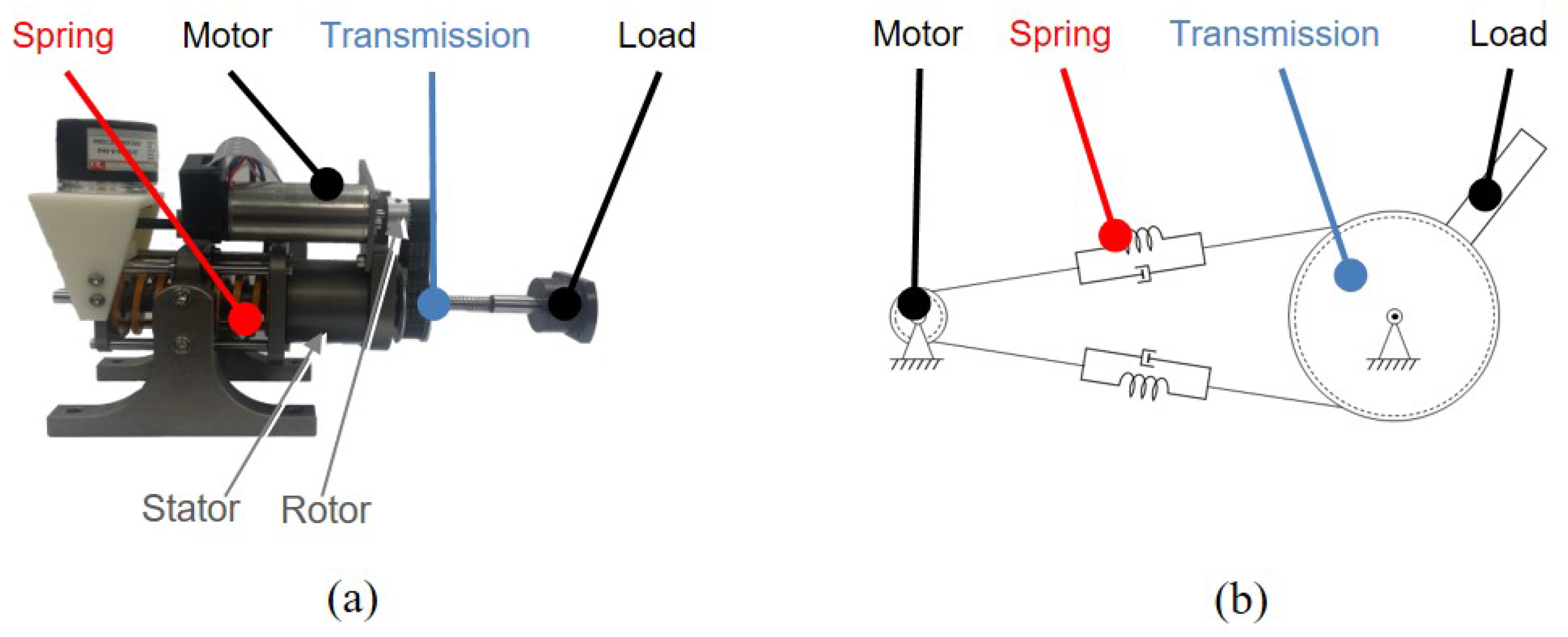
This video demonstrates the concept of series-elastic actuators (SEAs) and how they are used in rehabilitation robotics.

![]()

![]()
Python sample codes for robotics algorithms.
Filtering, SLAM, path planning, kinematics.
![]()
This is the abstract of the paper published on this painting UAV.
This paper describes a system for autonomous spray painting using a UAV, suitable for industrial applications. The work is motivated by the potential for such a system to achieve accurate and fast painting results. The PaintCopter is a quadrotor that has been custom fitted with an arm plus a spray gun on a pan-tilt mechanism. To enable long deployment times for industrial painting tasks, power and paint are delivered by lines from an external unit. The ability to paint planar surfaces such as walls in single color is a basic requirement for a spray painting system. But this work addresses more sophisticated operation that subsumes the basic task, including painting on 3D structure, and painting of a desired texture appearance. System operation consists of (a) an offline component to capture a 3D model of the target surface, (b) an offline component to design the painted surface appearance, and generate the associated robotic painting commands, (c) a live system that carries out the spray painting. Experimental results demonstrate autonomous spray painting by the UAV, doing area fill and versatile line painting on a 3D surface.
Donkey Car trained with Double Deep Q Learning (DDQN) in Unity Simulator.