robolab @ unipv
Autonomous Navigation of a Wheeled Mobile Robot in Ventilation Ducts
Moses Koledoye
15/07/2015
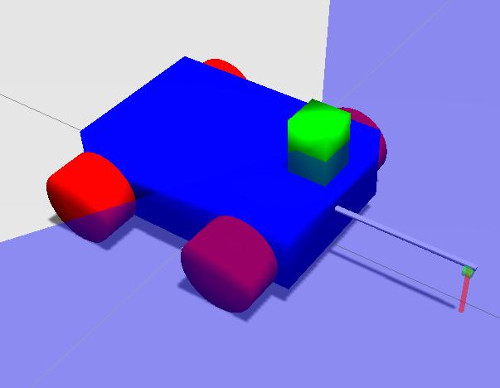
The aim of this Master’s thesis is to develop a suitable algorithm for the autonomous navigation of a 4-wheeled
mobile robot tasked with the exhaustive exploration of a network of ventilation ducts. Following the development
of the algorithm, there must be a corresponding implementation in C++/Python code that will satisfy the timing
and resource constraints of the underlying operating system – ROS.
Contents
- Autonomous Robots
- The MaaT-One Robot
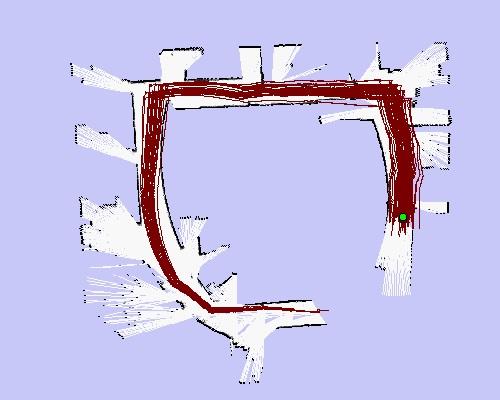
- The Mapping problem
- The Path Planning problem
- The Localization Problem
-
The ROS framework
-
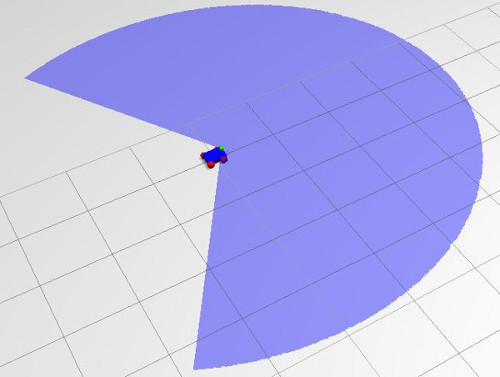
Modeling and simulation
-
Autonomous Navigation
- The Navigation Task: Finite State Machine
-
The Navigation Task: Algorithms
- Map Centroid Approach
- Map Edge Approach
Results
This thesis was aimed at addressing the problem of driving a robot autonomously
through a network of ventilation ducts for complete exploration.
The sole objective was to develop an algorithm that could help achieve this
and provide a corresponding implementation in C++ code.
Two approaches were presented in this writing as the outcomes of this
undertaking: the Map Centroid and Map Edge approaches.
Future Work
-
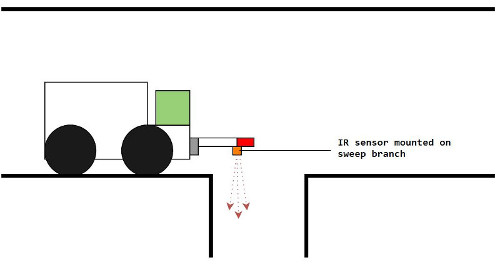
The robot is fitted with a camera that will be used for video documentation,
capturing details about features in each part of the duct network. -
Set up landmarks at strategic points in the tunnel to help alleviate
the problem of localization error accumulation.