132 private links
The oPhysics website is a collection of interactive physics simulations. It is a work in progress, and likely always will be. Content will be added as time allows.
About The Author
All of the content on this site was created by me, Tom Walsh. I retired after teaching high school physics for 27 years, and AP Physics for 25 years. Please click my name above to send me feedback about these simulations or suggestions for new simulations I could create.

This package provides a powerful simulation toolkit for thermal engineering plants such as power plants, district heating systems or heat pumps.
A playable disease simulation
After the first case of covid-19, the disease caused by the new strain of coronavirus, was announced in the United States, reports of further infections trickled in slowly. Two months later, that trickle has turned into a steady current.
The Fortran 77 codes for the open-loop and the closed-loop simulations for the Tennessee Eastman process (TEP) as well as the training and testing data files used for evaluating the data-driven methods (PCA, PLS, FDA, and CVA).
Computer simulations are invaluable tools for scientific discovery. However, accurate simulations are often slow to execute, which limits their applicability to extensive parameter exploration, large-scale data analysis, and uncertainty quantification. A promising route to accelerate simulations by building fast emulators with machine learning requires large training datasets, which can be prohibitively expensive to obtain with slow simulations. Here we present a method based on neural architecture search to build accurate emulators even with a limited number of training data. The method successfully accelerates simulations by up to 2 billion times in 10 scientific cases including astrophysics, climate science, biogeochemistry, high energy density physics, fusion energy, and seismology, using the same super-architecture, algorithm, and hyperparameters. Our approach also inherently provides emulator uncertainty estimation, adding further confidence in their use. We anticipate this work will accelerate research involving expensive simulations, allow more extensive parameters exploration, and enable new, previously unfeasible computational discovery.
A* algorithm visualizer written in pygame.
A gravity simulation using the runge kutter integration method.
Graphical A* simulation.
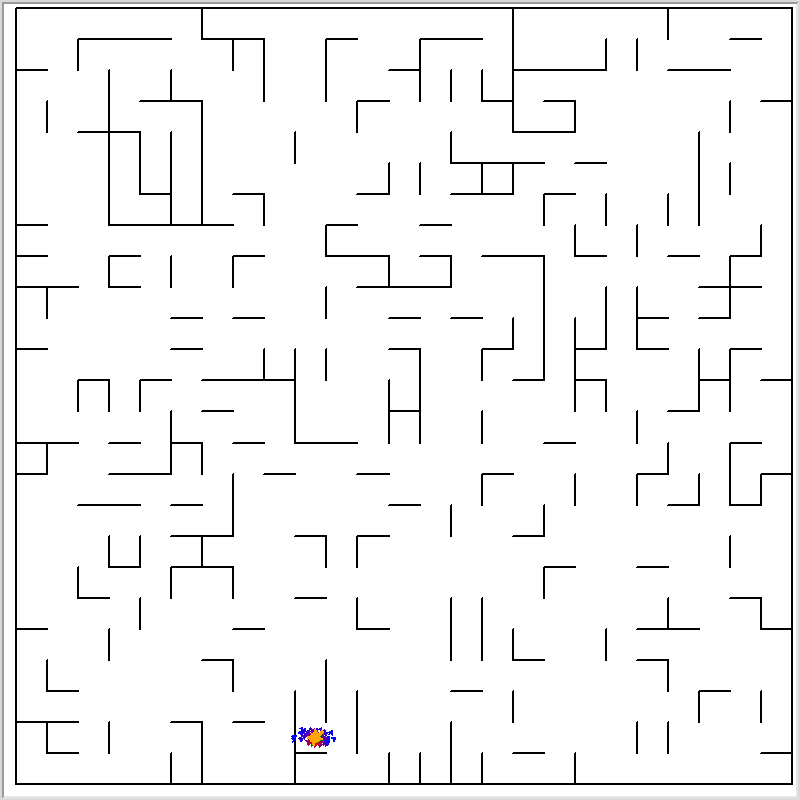
Particle filter is a Monte Carlo algorithm used to solve statistical inference problems. In this project, the turtle location and heading direction in maze was infered using particle filter. The green turtle is the actual location while the orange turtule is the estimated location. The arrows are particles. Blue arrows stand for low probability particles while red arrows stand for high probability particles. There are four sensors installed on the front, back, left and right of the turtle. The sensors measure its perpendicular distances to the closest walls in four directions, possibly bounded by some sensor limit.
A traffic simulation game exploring how small changes to roads affect cyclists, transit users, pedestrians, and drivers.

![]()

![]()
Python sample codes for robotics algorithms.
Filtering, SLAM, path planning, kinematics.
![]()
Donkey Car trained with Double Deep Q Learning (DDQN) in Unity Simulator.
Multi-robot systems promise to provide efficient solutions for an ever increasing variety of different applications, such as exploration of hostile environments, disaster recovery, construction, and nano-scale medicine.
Each of these applications is characterized by several aspects, such as environment dynamics (e.g. orbit, water flow, wind, rough terrain, bloodstream), robot types (e.g., mechatronics, sensors, actuators), and communication means (e.g., wifi, vision, stigmergy, etc.).
Physics-based simulation plays a fundamental role in the study of solutions for this wide set of applications.